Software
Hier finden Sie eine Auswahl an Software, die am Lehrstuhl für Geoinformatik entwickelt wurde. Mehr Informationen zu diesen und weiteren Software-Paketen finden Sie auf den einzelnen Seiten sowie im GitHub repository des Lehrstuhls.
3D City Database
3D City Database (3DCityDB) ist ein Open-Source-Programmpaket zur effizienten Speicherung, Verwaltung und Visualisierung von CityGML-basierten 3D-Stadtmodellen. Es kann unter www.3dcitydb.org oder https://github.com/3dcitydb kostenlos heruntergeladen werden und besteht aus einem Datenbankschema für um räumliche Datentypen erweiterte relationale Datenbanken, wobei derzeit Oracle Spatial und PostGIS unterstützt werden. Zudem wird eine Java-basierte Client-Anwendung zum Einlesen und Ausgeben beliebig großer CityGML-Dateien, zum Erzeugen von 3D-Visualisierungsmodellen in KML, COLLADA und glTF sowie zum Export von Daten in einfache Tabellenstrukturen wie Microsoft Excel oder Google Spreadsheets mitgeliefert. Die 3DCityDB ist weltweit in zahlreichen Städten und in Deutschland zudem bei allen Landesvermessungsämtern bzw. -betrieben im professionellen Einsatz. [mehr...]
r:trån - OpenDRIVE zu CityGML converter

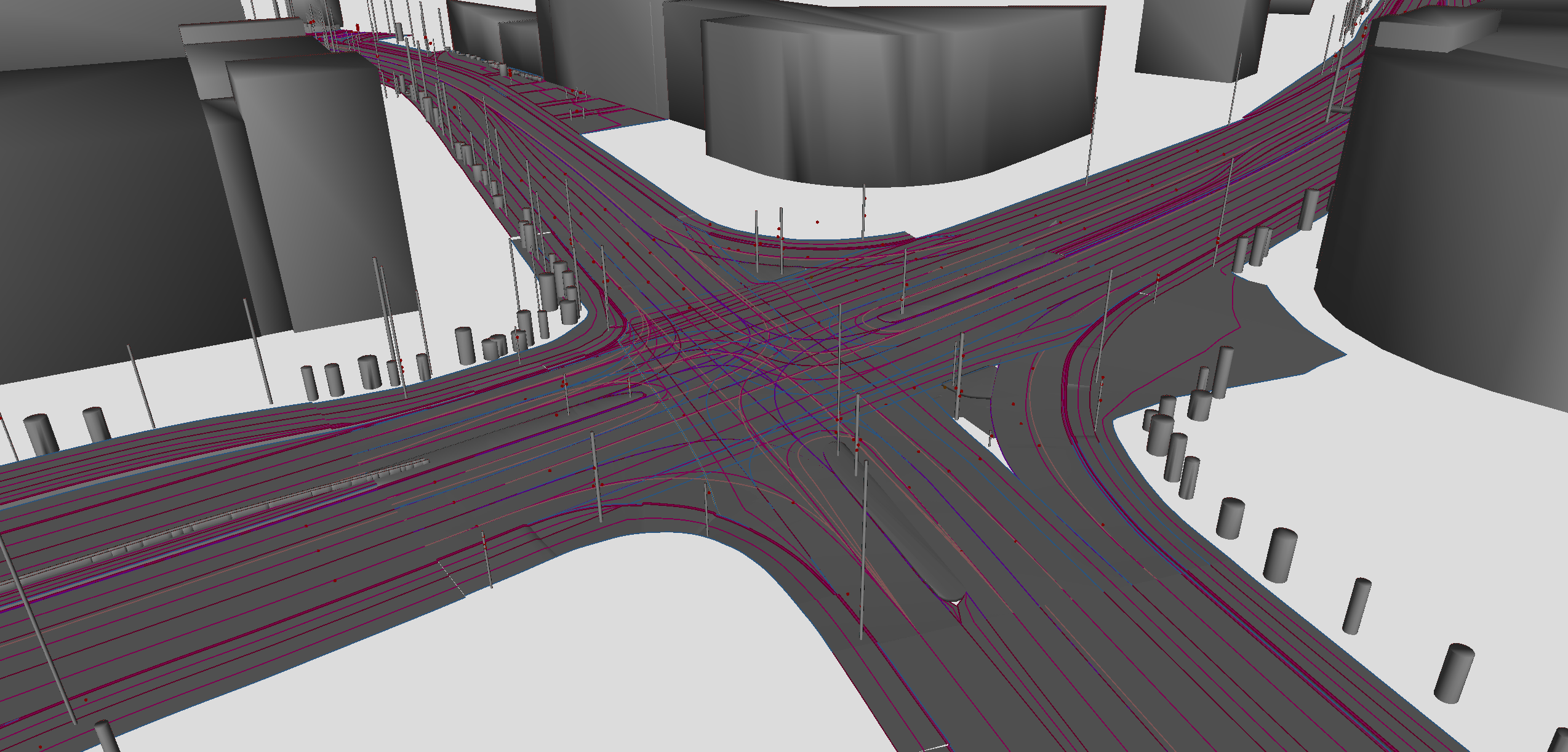
Zum Testen von automatisierten Fahrfunktionen werden hochdetaillierte Referenzkarten erstellt und im Straßennetzstandard OpenDRIVE beschrieben. Da OpenDRIVE für den sehr speziellen Anwendungsbereich der Fahrzeugsimulation entwickelt wurde, ist die Toolunterstützung innerhalb des GIS-Bereichs eher begrenzt.
Um diese Lücke zu schließen, hat der Lehrstuhl für Geoinformatik den Straßenraumtransformator r:trån auf GitHub veröffentlicht. Das Open-Source-Projekt konvertiert verfügbare OpenDRIVE-Datensätze in den virtuellen 3D-Stadtmodell-Standard CityGML.
Die duale Repräsentation ermöglicht die Verwendung von OpenDRIVE-Datensätzen innerhalb etablierter GIS-Tools wie der 3DCityDB, QGIS und FME. Weitere Demos und Anwendungsbeispiele können auf der Projekt-Website https://rtron.io gefunden werden. Das Projekt wurde im Rahmen des öffentlich geförderten Forschungsprojektes SAVe entwickelt, welches von der AUDI AG geführt wird und mehrere Partner aus Industrie, Forschung und öffentlicher Verwaltung zusammenbringt.
InterSensorService
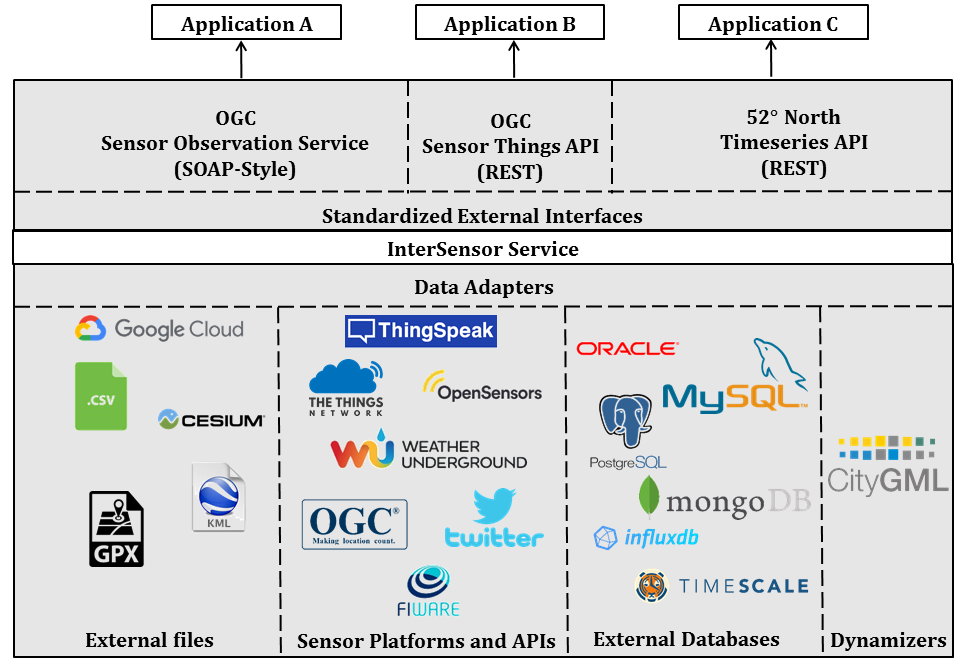
Bei vielen Smart-City-Projekten sind mehrere Akteure und Unternehmen beteiligt, die ihre eigenen Sensoren und IoT-Geräte verwenden, welche von unterschiedlichen Plattformen und APIs verwaltet werden. Um innerhalb eines gemeinsamen Betriebsrahmens zu arbeiten, spielen Sensor-Web-Infrastrukturen eine Schlüsselrolle bei der Bereitstellung von Interoperabilität zwischen heterogenen Sensorplattformen und Beobachtungen. Es ist jedoch unwahrscheinlich, dass alle Beteiligten bereit sind, ihre proprietären Daten in einen Datenspeicher eines Drittanbieters im Sensor-Web einzuspeisen.
Wir stellen einen neuen leichtgewichtigen Webservice namens InterSensor Service vor, der es Benutzern ermöglicht, sich mit mehreren IoT-Plattformen, Datenbanken und Basisdateien zu verbinden und ihre Beobachtungen abzurufen, ohne sich um die Datenspeicherung und die Vielzahl unterschiedlicher APIs kümmern zu müssen. Es handelt sich um eine Java-Anwendung, die auf dem Spring-Framework basiert und als freie und Open Source verfügbar ist. Weitere Informationen finden Sie unter https://www.intersensorservice.org/ sowie auf der zugehörigen GitHub-Seite.
Cesium Point Cloud Generator
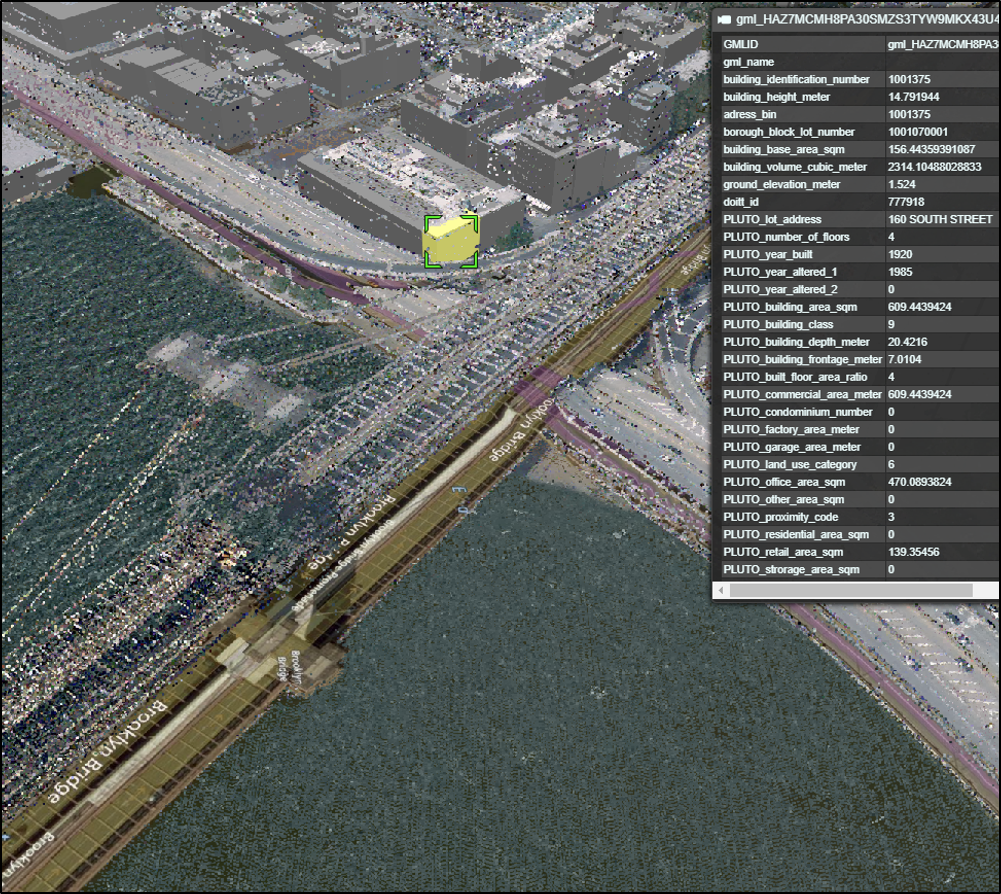
Der Cesium Point Cloud Generator (CPCG) ist ein Java-basiertes Werkzeug zur Erzeugung von Punktwolken-Visualisierungsdatensätzen gemäß Cesium 3D Tiles. Unter Verwendung einer lokalen, portablen SQLite-Datenbank nimmt es 3D-Punktwolken-Datensätze, die als XYZ-Textdateien vorliegen (möglicherweise einschließlich RGB-Farbinformationen für jeden Punkt) und erzeugt eine 3DTiles-Punktwolke, die für die interaktive 3D-Betrachtung mit dem Cesium WebGL Digital Globe verwendet werden kann. Das Werkzeug ist in der Lage, mehrere Detailstufen zu erzeugen, um die Darstellungsleistung zu erhöhen. Die generierten Punktwolken-Datensätze können in einem Cesium-basierten Web-Client, wie z.B. dem 3DCityDB Web Map Client, visualisiert werden. Weitere Informationen finden Sie auf der entsprechenden GitHub-Seite.