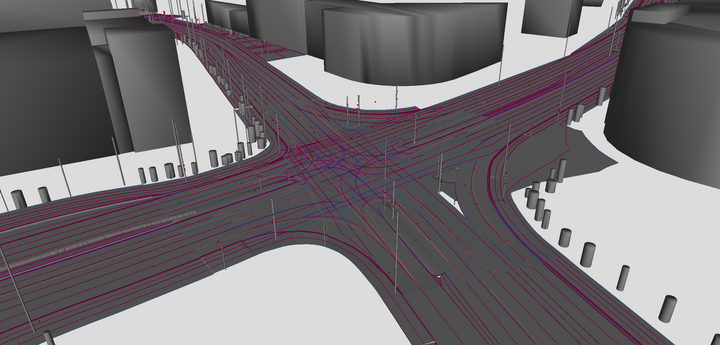
Zum Testen von automatisierten Fahrfunktionen werden hochdetaillierte Referenzkarten erstellt und im Straßennetzstandard OpenDRIVE beschrieben. Da OpenDRIVE für den sehr speziellen Anwendungsbereich der Fahrzeugsimulation entwickelt wurde, ist die Toolunterstützung innerhalb des GIS-Bereichs eher begrenzt.
Um diese Lücke zu schließen, hat der Lehrstuhl für Geoinformatik den Straßenraumtransformator r:trån auf GitHub veröffentlicht. Das Open-Source-Projekt konvertiert verfügbare OpenDRIVE-Datensätze in den virtuellen 3D-Stadtmodell-Standard CityGML.
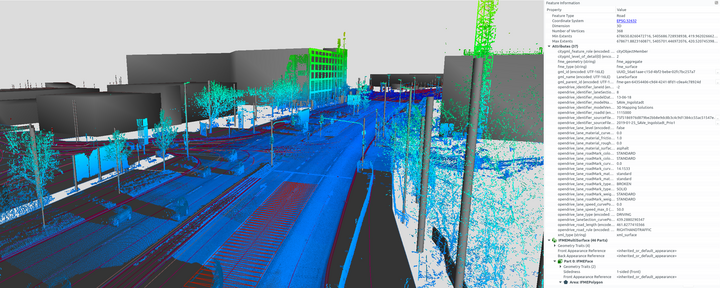
Die duale Repräsentation ermöglicht die Verwendung von OpenDRIVE-Datensätzen innerhalb etablierter GIS-Tools wie der 3DCityDB, QGIS und FME. Weitere Demos und Anwendungsbeispiele können auf der Projekt-Website https://rtron.io gefunden werden. Das Projekt wurde im Rahmen des öffentlich geförderten Forschungsprojektes SAVe entwickelt, welches von der AUDI AG geführt wird und mehrere Partner aus Industrie, Forschung und öffentlicher Verwaltung zusammenbringt.
Wenn Sie sich für die Umfeldsimulation von Fahrzeugen interessieren, könnte Sie auch unser kürzlich erschienener Artikel interessieren, in dem wir einen submikroskopischen Fahrsimulator mit einem Fußgängersimulationsframework zur Laufzeit koppeln. Die anwendungsspezifischen Zielformate werden vor dem Simulationslauf automatisch generiert:
-
Schwab, Benedikt; Beil, Christof; Kolbe Thomas H.: Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability 12 (9), 2020, 3799 mehr… BibTeX
Darüber hinaus können diese Artikel auch von Interesse sein:
-
Kutzner, Tatjana; Chaturvedi, Kanishk; Kolbe, Thomas H.: CityGML 3.0: New Functions Open Up New Applications. PFG – Journal of Photogrammetry, Remote Sensing and Geoinformation Science, 2020, 19 mehr… BibTeX
-
Schwab, Benedikt; Kolbe, Thomas H.: Requirement Analysis of 3D Road Space Models for Automated Driving. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences IV-4/W8, 2019, 99-106 mehr… BibTeX
-
Beil, Christof; Kolbe, Thomas H.: CityGML and the streets of New York - A proposal for detailed street space modelling. Proceedings of the 12th International 3D GeoInfo Conference 2017 (ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences), ISPRS, 2017, 9-16 mehr… BibTeX